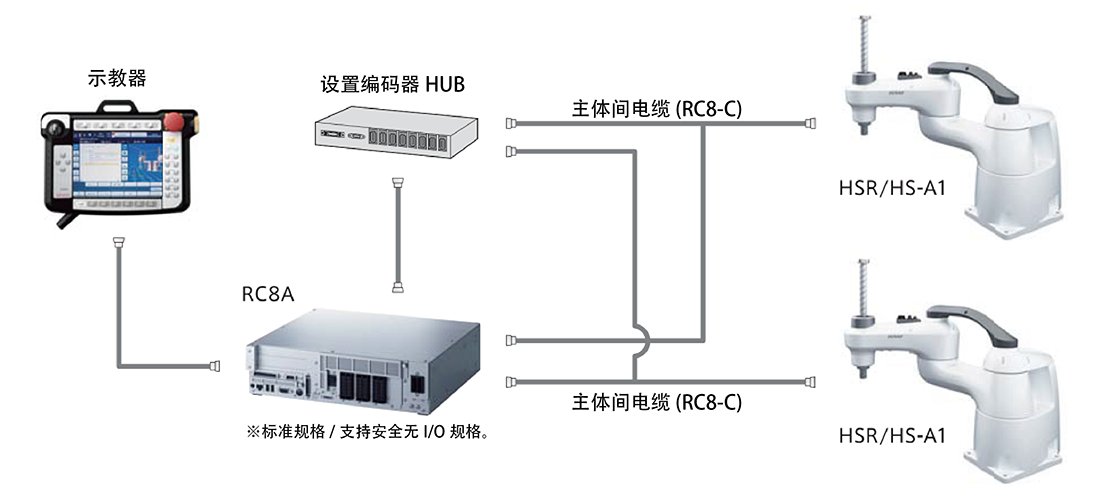
单控制器双臂控制
用一个控制器就能控制2个水平多关节机器人。 既节省空间又提高操作性。
用一个控制器综合控制2个机器人。
实现了高速性,并削减调节所需人工、占地面积、引进成本。
技术特点
削减设置面积和引进成本
用1个控制器控制2个机器人手臂,
故而削减了1个控制器的设置空间和成本。

大幅削减调节所需人工
操作和编程集中于1个控制器,缩短了软件设计和调试时间。

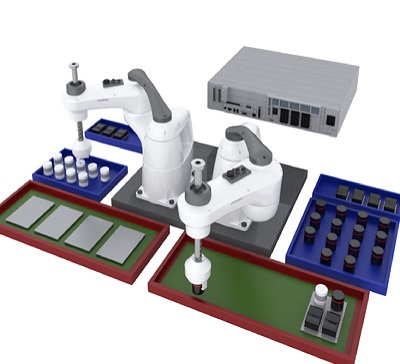
随意组合高性能机器人
因为使用高速高精度动作的HSR・HS-A1,故最适合于循环时间短的设备。
能够随意组合臂长度和Z轴行程,从而应对多种设备和工序。
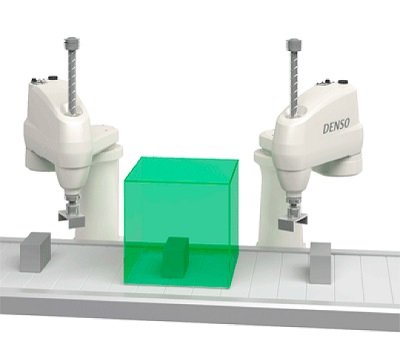
由扩展功能应对多种工序
通过组合排他性控制和虚拟围栏功能,在狭窄的区域避开碰撞。
通过组合协调控制功能,应对沉重物品和长物品的搬送。