传送带跟踪
机器人会追踪工件,在不停止输送机的状态下也能进行搬送/排列作业。
机器人会追踪工件,在不停止输送机的状态下也能进行搬送/排列作业。输送机跟踪有以下2种类型。
| 传感器跟踪
拾取以任意间隔排成直线输送的工件时使用传感器跟踪。采用的是当工件穿过光电传感器的前部就会触发信号的方式。事先登录工件穿过光电传感器前部时的工件位置,并依次计算每次收到触发信号时该工件所处的位置,交由机器人追踪。
| 视觉跟踪
拾取以任意位置/姿势放置输送的工件时使用视觉跟踪。
采用的是当视觉传感器通过图像识别检测到工件就会触发信号的方式。
登录每次收到触发信号时通过图像识别检测到的工件位置/姿势,并依次计算该工件的所处位置,交由机器人追踪。
设定方法
通过向导形式的GUI就能轻松地调整繁杂的输送机跟踪。

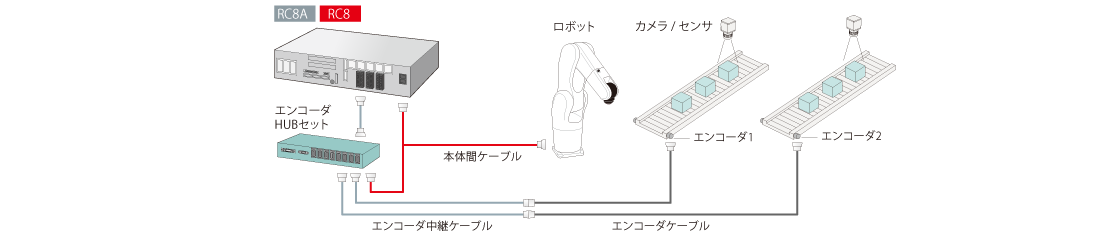
システム構成