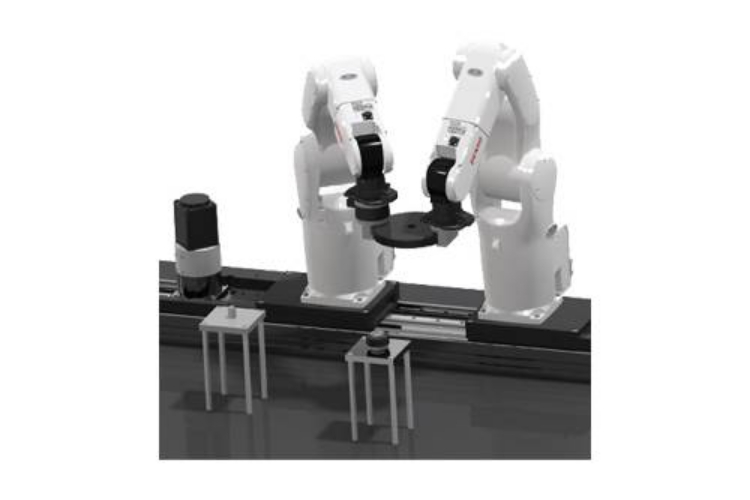
通过使用多台机器人,可进行重物、超长物的搬送/组装作业。
协调控制是一种同步运行多台机器人的功能,可以搬送/组装1台机器人难以做到的超长物和柔软物。
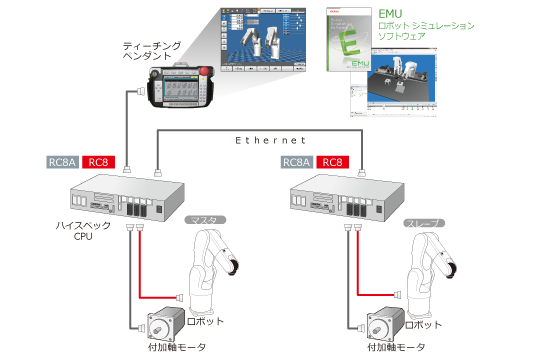
使用本功能时,由1台控制器进行多台机器人的程序制作和执行,此外,位置示教使用多台机器人的通用坐标,因此,能够轻松地进行编程和各种设定。
システム構成
通过集中对主站侧机器人控制器的控制(程序/各种设定)和示教操作,可以实现简单配置下的多台协调动作。