通过以工件坐标原点为中心做旋转运动,可轻松地进行基于对象物的示教。
通常,手动模式下的旋转动作是指不改变手部位置坐标进行旋转运动。使用外部TCP功能时,能够以所设定的工件坐标原点为中心,进行旋转运动。
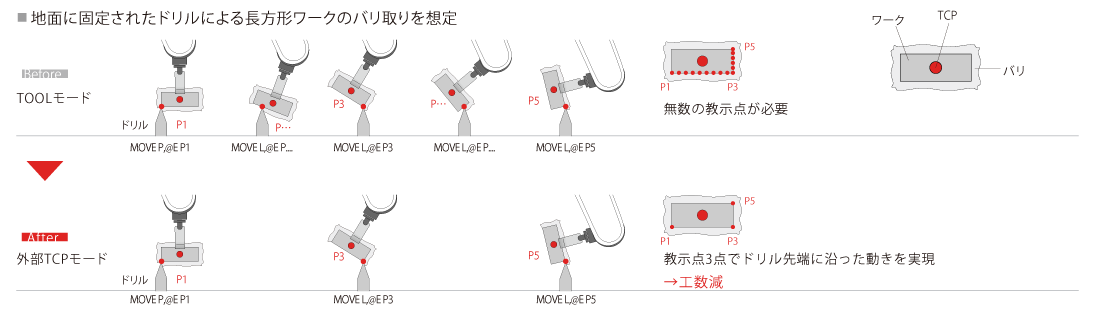
使用固定在设备上的刳刨机去除工件的毛边,或是使用固定在设备上的密封枪给工件涂抹密封胶时,若希望机器人手持工件做CP动作(直线、圆弧),则可使用外部TCP功能减少示教点。