

最大动作领域|520mm / 最大可搬运质量|4kg
耐二氧化氢水|35%二氧化氢水(干 / 湿)
保护等级|手腕部 IP67 / 主体 IP65
标准循环时间|0.35秒


可应对医药和医疗行业严格的卫生要求。
最大动作领域|520mm / 最大可搬运质量|4kg
耐二氧化氢水|35%二氧化氢水(干 / 湿)
保护等级|手腕部 IP67 / 主体 IP65
标准循环时间|0.35秒
为医药和医疗设备制造工艺以及药剂调制的自动化做贡献。
为您呈上可应对医药和医疗行业严格卫生要求的机械手提案。杀菌环境下的自动化,可规避人工作业中的异物混入、作业失误以及作业员暴露的风险。
产品特性

细胞培养自动化
●机械手再现熟练作业员的动作,消除质量因作业员而异的情况,实现高质量的细胞培养自动化。
●规避人工作业造成的污染和作业员暴露的风险,实现清洁且安全的系统。
●可使用通用器具,再现与人无异的移液和开盖等动作。
选配件

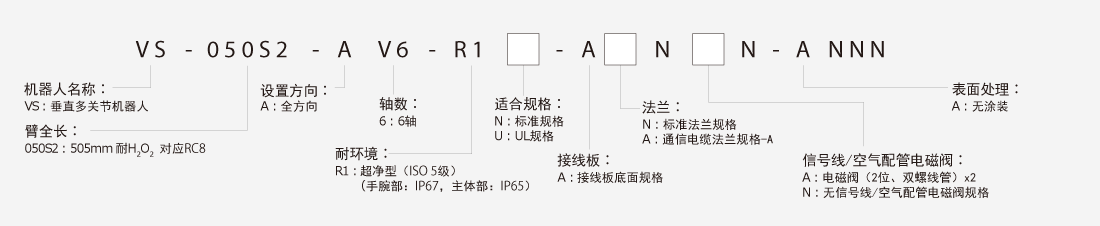
型号详解
| 标准
| 项目 | 单位 | 规格 | ||
|---|---|---|---|---|
| 产品名称 | - | VS-050S2 | ||
| 轴数 | - | 6 | ||
| 位置检测方式 | - | 绝对编码器 | ||
| 驱动电机、制动器 | - | 带全轴AC伺服电机 + 全轴制动器 | ||
| 机械臂全长(第1臂 + 第2臂) | mm | 520(255+265) | ||
| 最大动作领域(P点) | mm | 520 | ||
| 最小运行区域(P点) | mm | 183.5 | ||
| 动作角度 | J1 | ° | ±180(*3) | |
| J2 | +120, −115 | |||
| J3 | +141, −115 | |||
| J4 | ±270 | |||
| J5 | ±115(*4) | |||
| J6 | ±360 | |||
| 最大可搬运质量 | kg | 4 | ||
| 合成最大速度(工具安装面中心) | mm/sec | 8,570 | ||
| 标准循环时间(*1) | sec | 0.35 | ||
| 重复定位精度(工具安装面中心)(*2) | mm | ±0.02 | ||
| 最大容许惯性力矩 | J4,J5 | kgm2 | 0.2 | |
| J6 | 0.05 | |||
| 最大容许力矩 | J4,J5 | Nm | 6.66 | |
| J6 | 3.13 | |||
|
信号线、气动配管电磁阀 (选件) |
信号线 | - | 10芯(*5)(*6) | |
| 气动配管电磁阀 | - | 电磁阀(2位置,双电磁阀)×2 | ||
| 通信电缆法兰规格-A(选购件) | - | 25芯(17+8)(*6) | ||
| 空气源 | 常用压力 | MPa | 0.20~0.39 | |
| 最大容许压力 | 0.49 | |||
| 騒音(A加权等效连续声压级) | dB | 65以下 | ||
| 抗环境性能 | 二氧化氢环境 | - | 35%二氧化氢蒸汽(干 / 湿) | |
| 保护等级 | - | 手腕 IP67 / 手腕部 IP65 | ||
| 净化度 | - | ISO等级5 | ||
| 质量 | kg | 约34 | ||
*1:负荷1kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
*2:重复定位精度是周围环境温度恒定时的精度。
*3:壁挂型设置时对运行角度有限制。有关详情请另行查询。
*4:选择通信电缆法兰规格-A时,J5的运行角度为+120,-110。
*5:和通信电缆法兰规格-A同时选择时,本线(接近传感器等的信号线)为4芯。
*6:容许电流有限制。
| RC8
| 分 类 | 选 件 名 | 数 量 |
|---|---|---|
| 机器人&附件 | 机器人本体 | 1台 |
| 本体之间电缆(选件) | 1根 | |
| 固定件 | 2组 | |
| 定位销钉(带内螺纹的定位销钉&菱形销钉) | 1组 | |
| 设置面用O型圈 | 1个 | |
| 控制器&附件 | 机器人控制器 | 1台 |
| 电源电缆(5m) | 1根 | |
| 代用教导器的连接器(UL规格之外) | 1个 | |
| 其它软件 | WINCAPSⅢ Trial安装CD | 1张 |
|
使用说明书 「指导手册」光盘2张、「使用安全注意」1张 |
1组 | |
| 搬运说明书 | 1张 | |
| 大号警告标识(A4) | 1张 | |
| 小号警告标识 | 2张 | |
| 注意标识 | 1张 | |
| 高温注意标识 | 1张 | |
| 方向指示标识 | 1张 | |
| RANG标识 | 1张 |
*NOTE:在订购UL规格时,须同时购买选购件中的制动解除组件,和教导器、迷你教导器或紧急停止按钮盒的任意一种。