


-

插件
可使用PacScript(DENSO机器人语言)直接控制各种FA产品(图像处理装置、传感器、机械手等)。
-

b-CAP( 通信协议)
可直接从PC或PLC等各种机器向机器人发送动作指令包,从而控制机器人。
-

Command Slave
可使用PLC语言(梯形图程序)控制机器人。我们备有支持107种机器人指令的功能块(FB)。
-

最佳速度控制
根据机器人的顶端负载,通过优化动作速度和加速度来缩短间歇时间。
-

力量限制功能
调整推力,保护工件和机械手免受过载力。
-

碰撞检测功能
在机器人与外围机器及工件发生冲突时,检测出该冲突,并紧急停止机器人。
-

特异点回避功能
在通过奇点附近等机器人姿势发生改变的点、需要增补直线时,使用该功能可顺畅地进行动作。
-

高轨迹控制
掌握速度变化导致的轨迹变化,通过圆弧动作/自由曲线插补动作来提高轨迹精度。
-
Motion Skip
自动运行中,在不停止的状态下根据外部指令变更目标点进行动作。
-

Autofig
针对指定的点计算最佳形态[fig],然后通过合理的动作缩短间歇时间和示教时间。
-

EtherCAT Slave motion
能够由EtherCAT Master搭载的IPC 一元化操作,生成机器人的轨道。
-

外部TCP
通过以工件坐标原点为中心做旋转运动,可轻松地进行基于对象物的示教。
-
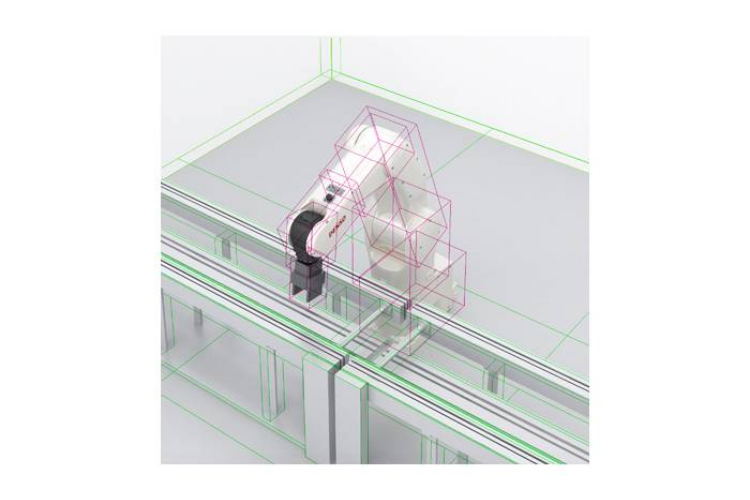
虚拟围栏
避免机器人与外围设备相互干扰。
-

排他性控制
可限制多台机器人侵入排外区域。
-
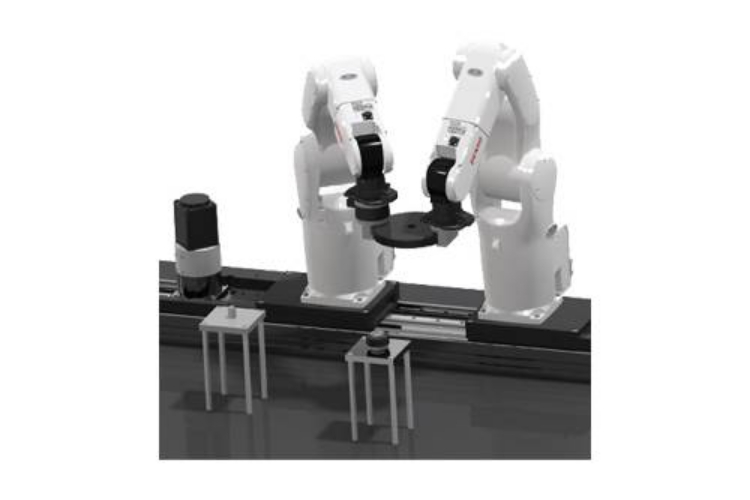
协调控制
通过使用多台机器人,可进行重物、超长物的搬送/组装作业。
-

带力量传感器 力量限制功能
可使用力传感器将机器人手部的按压力控制在一定水平。在安装或研磨等时使用本功能,可稳定地执行作业。
-

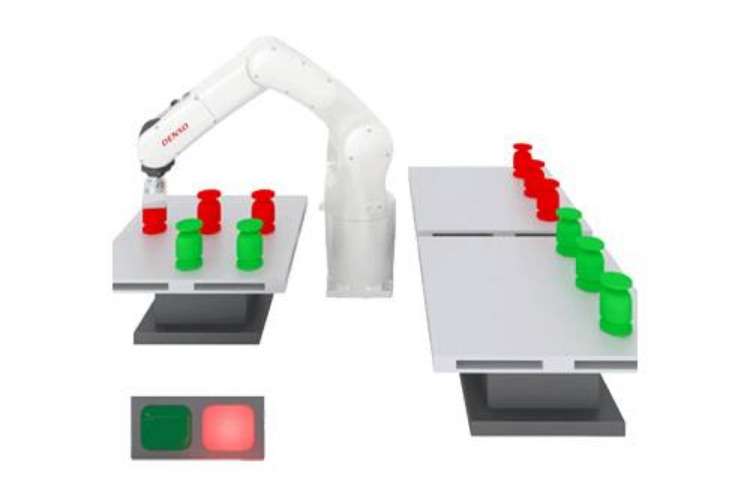
传送带跟踪
机器人会追踪工件,在不停止输送机的状态下也能进行搬送/排列作业。
-

附加轴控制
与机器人相同,可使用界面控制附加轴。通过自动增益调节功能,能够轻松地进行调整。
-
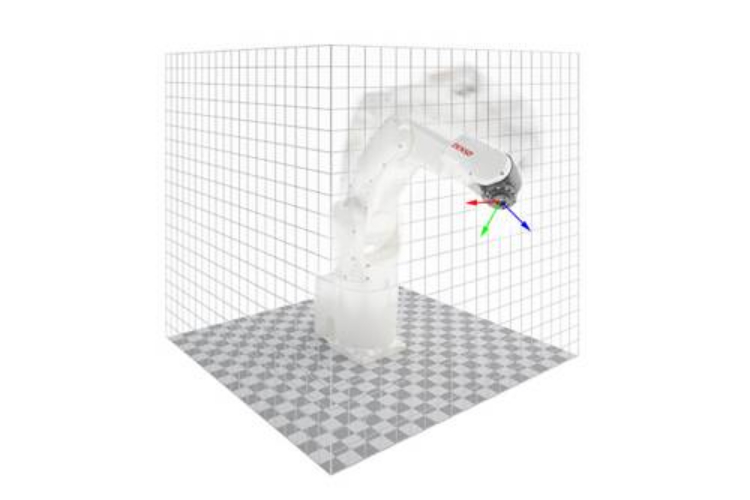
高精度校准(Hi-Cal)
通过提高绝对精度,减少机器人间的差异,能够大幅度地减少示教工时。
-
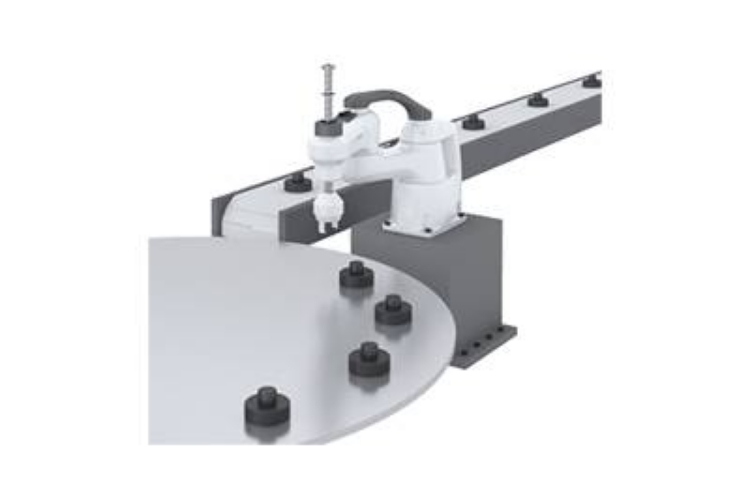
圆形跟踪
追踪圆弧轨道上的工件,能够在不停止转台的状态下进行动作。由于使用向导形式的GUI进行设定,因此可轻松地导入。
-

外部轴控制
通过增设外部轴板(EtherCAT),可控制各种容量的伺服电机。
-

单控制器双臂控制
用一个控制器就能控制2个水平多关节机器人。 既节省空间又提高操作性。
-

附加轴跟踪
由控制器内部附加轴驱动传送带,同时控制传送带和机器人,实现了高精度跟踪搬送。
产品中心